Dstar精简版是一个用C实现的D *精简版的算法,如[凯尼格,2002]解释。
也有一些小的修改,这个代码来提高计算时间和路径距离。这是一个非常简单的软件,并应采取很少的时间来了解和整合。
命令:
[Q / Q] - 退出
[R / R] - 重新规划
[A / A] - 切换自动重新计划
[C / C] - 清除(重启)
鼠标左键点击 - 使细胞不能游历(成本-1)
鼠标中点击 - 移动目标细胞
点击鼠标右键 - 移动开始小区
小区颜色如下:
红色 - 不能游历
绿色 - 穿越,但与成本改变
红/绿与小紫方 - 细胞是在openList
黄色 - 启动电池
紫色 - 目标细胞
用自己的源:
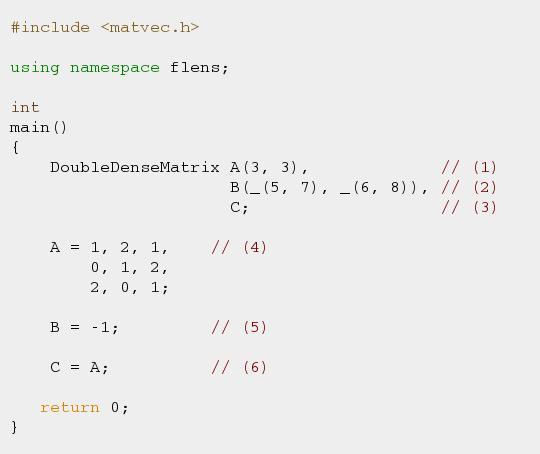
下面是使用Dstar类的简单工作的测试程序:
#包括“Dstar.h”
诠释主要(){
Dstar * dstar =新Dstar();
名单mypath中;
dstar->的init(0,0,10,5); //设置开始到(0,0)和目标(10,5)
dstar-> updateCell(3,4,-1); //设置单元格(3,4)是不可穿越
dstar-> updateCell(2,2,42.432); //设置集(2,2)已耗资42.432
dstar->重新计划(); //规划路径
mypath中= dstar-> getPath(); //路径检索
dstar-> updateStart(10,2); //将开始(10,2)
dstar->重新计划(); //规划路径
mypath中= dstar-> getPath(); //路径检索
dstar-> updateGoal(0,1); //此举的目标是(0,1)
dstar->重新计划(); //规划路径
mypath中= dstar-> getPath(); //路径检索
返回0;
}
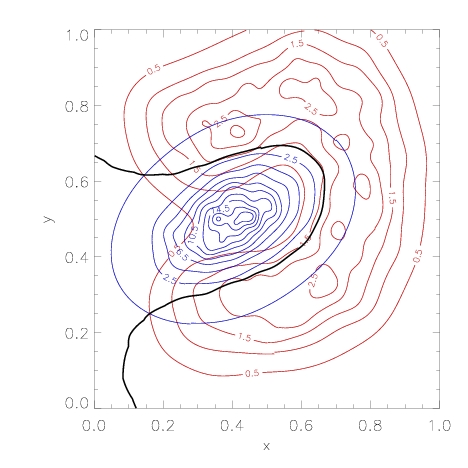
软件截图:
评论没有发现