软件截图:

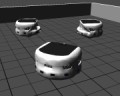
Webots是用于模拟,程序和模拟移动机器人的开发环境。与Webots用户可以设计复杂的机器人的设置,与一个或几个,相似或不同的机器人,在共享环境中。每个对象的属性,比如形状,颜色,质地,质量,摩擦等,由用户选择。大量可供选择的模拟传感器和执行器可用来装备每个机器人。该机器人控制器可与内置IDE或与第三方开发环境进行编程。机器人的行为可以在物理现实世界进行测试。控制器的程序可以任选地转移到市售真实机器人。 Webots是被全球超过750所大学和研究中心。与Webots,您可以利用已通过共同开发技术的瑞士联邦理工学院洛桑分校一个成熟的技术,全面的测试,有据可查,并连续保持了10年以上。
什么是新的在此版本中:
版本6.4.4将删除所有Webots 5兼容功能,例如函数名不开始与“wb_”前缀。

评论没有发现